
演示“距离矢量路由算法”工作原理
现代计算机网络通常使用动态路由算法,因为这类算法能够适应网络的拓扑和流量变化,其中最流行的两种动态路由算法是“距离矢量路由算法”和“链路状态路由算法”。
距离矢量路由算法(Distance Vector Routing,DV)是ARPANET网络上最早使用的路由算法,也称Bellman-Ford路由算法和Ford-Fulkerson算法,主要在 RIP(Route Information Protocol)协议中使用。Cisco的IGRP和EIGRP路由协议也是采用DV这种路由算法的。
“距离矢量路由算法”的基本思想如下:每个路由器维护一个距离矢量(通常是以延时是作变量的)表,然后通过相邻路由器之间的距离矢量通告进行距离矢 量表的更新。每个距离矢量表项包括两部分:到达目的结点的最佳输出线路,和到达目的结点所需时间或距离,通信子网中的其它每个路由器在表中占据一个表项, 并作为该表项的索引。每隔一段时间,路由器会向所有邻居结点发送它到每个目的结点的距离表,同时它也接收每个邻居结点发来的距离表。这样以此类推,经过一 段时间后便可将网络中各路由器所获得的距离矢量信息在各路由器上统一起来,这样各路由器只需要查看这个距离矢量表就可以为不同来源分组找到一条最佳的路 由。
现假定用延时作为距离的度量,举一个简单的例子,如图7-37所示。假设某个时候路由器Y收到其邻居路由器X的距离矢量,其中m是Y估计到达路由器 X的延时。若Y路由器知道它到邻居Z的延时为n,那么它可以得知Z通过Y到达X需要花费时间m+n。如果Z路由器还有其他相邻路由器,则对于从其他每个邻 居那儿收到的距离矢量,该路由器执行同样的计算,最后从中选择费时最小的路由作为Z去往X的最佳路由,然后更新其路由表,并通告给其邻居路由器。

距离矢量路由算法简单实例
现以一个如图7-38所示的示例介绍距离矢量算法中的路由的确定流程,各段链路的延时均已在图中标注。A、B、C、D、E代表五个路由器,假设路由表的传递方向为:A → B → C → D → E(这与路由器启动的先后次序有关)。下面具体的流程。
(1)初始状态下,各路由器都只收集直接相连的链路的延时信息,各路由器结点得出各自的初始矢量表如图7-39所示。因为各结点间还没有交换路由信息,所以它们的初始状态的路由表也如它们的矢量表。
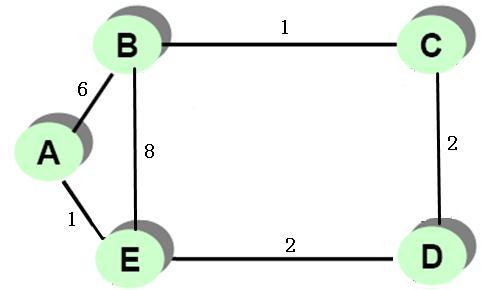
图7-38 距离矢量算法路由确定示例
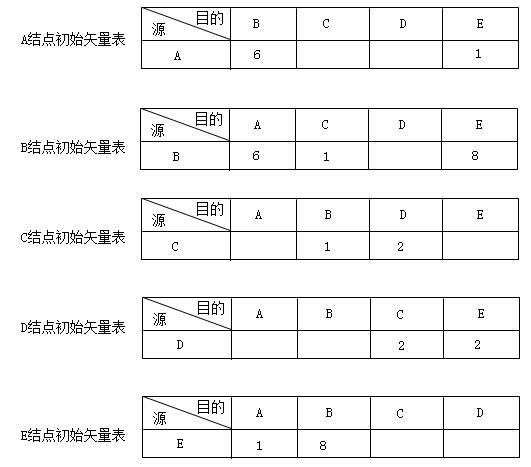
初始状态下各结点的矢量表
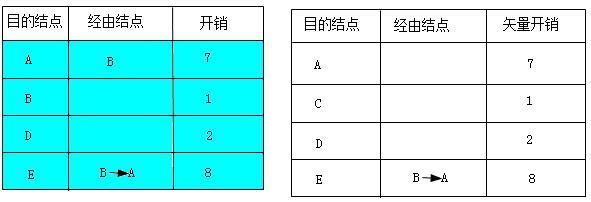
(2) 现在路由器A把它的路由表发给路由器B。此时它会综合从A路由器发来的路由表和它自己的初始路由表,更新为一个新的矢量表,如图7-40左图所示(最终的 矢量表如图中深颜色部分)。从图中可以看出,从B结点到达E结点此时存在两条路径,一条是直达的,一条是通过A结点到达的。而且这两条线的开销不同,经过 A结点到达E结点的开销(7)比直达线路的开销(8)更低,所以最终在形成的路由表中,把到达E结点的线路改为经由A结点这条线路,如图7-40右图所 示。
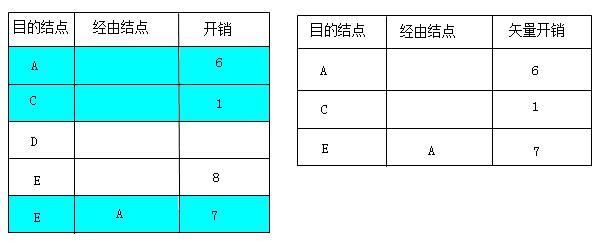
B结点新的矢量表和路由表
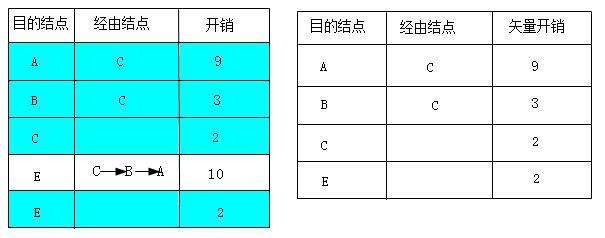
(3)B再把最终形成的路由表发给路由器C。同样,路由器C也要把它原来的初始路由表与从B路由器发来的路由表进行综合,形成新的矢量表,如图 7-41左图所示(最终的矢量表如图中深颜色部分)。在新的矢量表中,除了最初的直接连接的B和D结点间的矢量外,还新收集了到达A和E结点的矢量信息。 因为C结点没有与A和E结点的直接连接,在初始路由表中并没有到达这两个结点的路由信息,所以现在只有采用从B路由器发来的路由表中,经过B结点到达A、 E结点的路径。
这里要注意一点,因为在B结点路由表中就已识别了直接通过B结点到达E结点的开销(8)还比依次通过B、A结点到达E结点的开销(7)大,所以在C结点路由表中是采用依次通过B、A结点到达E结点这条路径。最终形成的路由表如图7-41右图所示。
C结点新的矢量表和路由表
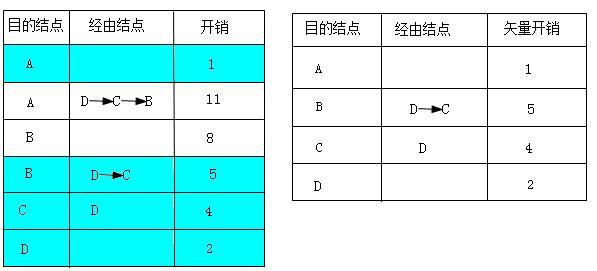
(4)路由器 C再把它的最终路由表发给路由器D。同样,路由器D也要把它原来的初始路由表与从C路由器发来的路由表进行综合,形成新的矢量表,如图7-42左图所示 (最终的矢量表如图中深颜色部分)。在新的矢量表中,除了最初的直接连接的C和E结点间的矢量信息外,还新收集了到达A和B结点的矢量信息。因为D结点没 有与A和B结点的直接连接,所以在其最初的路由表中并没有到达这两个结点的矢量信息,此时仍采用经过C结点到达A和B结点的路径。
在这里同样要注意一点,从D结点到达E结点也有两条路径:一是直接到达,二是依次通过C、B、A结点到达,经过比较发现直接连接到达的开销(2)要 比通过C、B、A结点到达E结点路径的开销(10)要小,所以在D结点中,到达E结点是采用直接连接这条线路。最终形成的路由表如图7-42右图所示。
(5)路由器 D再把它的最终路由表发给路由器E。同样,路由器E也要把它原来的初始路由表与从D路由器发来的路由表进行综合,形成新的矢量表,如图7-43左图所示 (最终的矢量表如图中深颜色部分)。在新的矢量表中,除了最初的直接连接的A、B和D结点间的矢量外,还新收集了到达C结点的矢量信息,因为E结点没有与 C结点的直接连接。此时仍采用经过D结点到达C结点的路径。
D结点新的矢量表和路由表
在这里有两个要注意的地方:一是从E结点到达A结点的路径问题,因为此时E结点与A结点是直接连接的,而且其开销(1)要比原来从D路由口器发来的 路由表中提供的通过D、C、B结点到达A结点路径开销(11)要小,所以在最终的E结点路由表中,到达A结点是采用直接连接这条线路。二是E结点虽然也是 与B结点直接连接,但它的开销(8)还要比原来从D路由器发来的路由表中提供的依次经过D、C这两个结点到达B结点的开销(5)大,所以在最终的E结点路 由表中,到达B结点是采用依次经过D、C两个结点这条路径。最终形成的路由表如图7-43右图所示。
E结点新的矢量表和路由表
通过以上步骤,网络中各路由器就完整了整个路由表的确定,当然在拓扑结构发生变化时,各路由器的路由表又会发生变化,重新进行更新。
好文章,需要你的鼓励

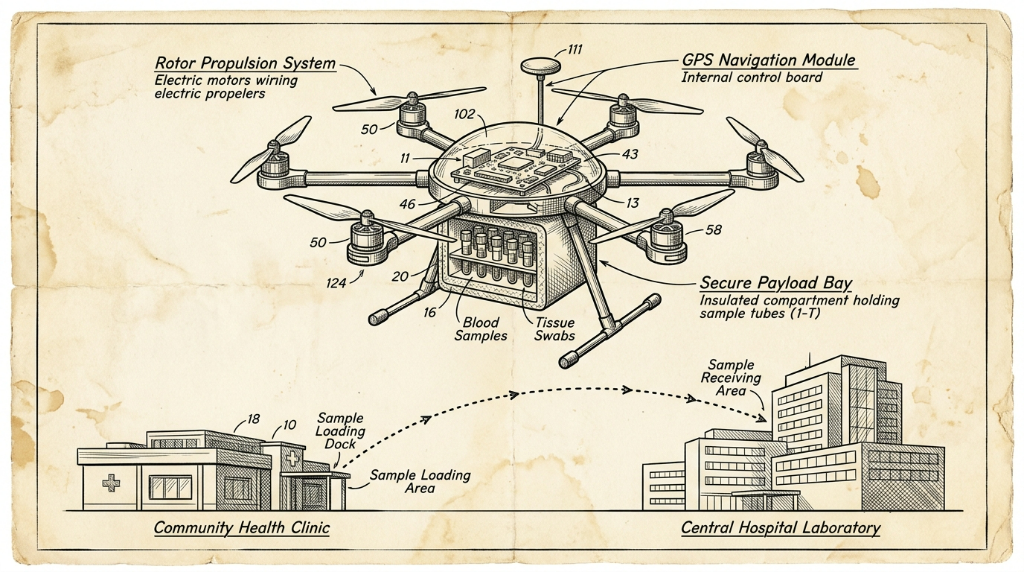
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2015
07/31
21:47
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
